A Robot That Tries to Chop Up Soft Vegetables and Fruits With a Light Sensor. a Salat Maker If You Will.
by Ríkey Magnúsdóttir Ringsted in Craft > Art
154 Views, 1 Favorites, 0 Comments
A Robot That Tries to Chop Up Soft Vegetables and Fruits With a Light Sensor. a Salat Maker If You Will.


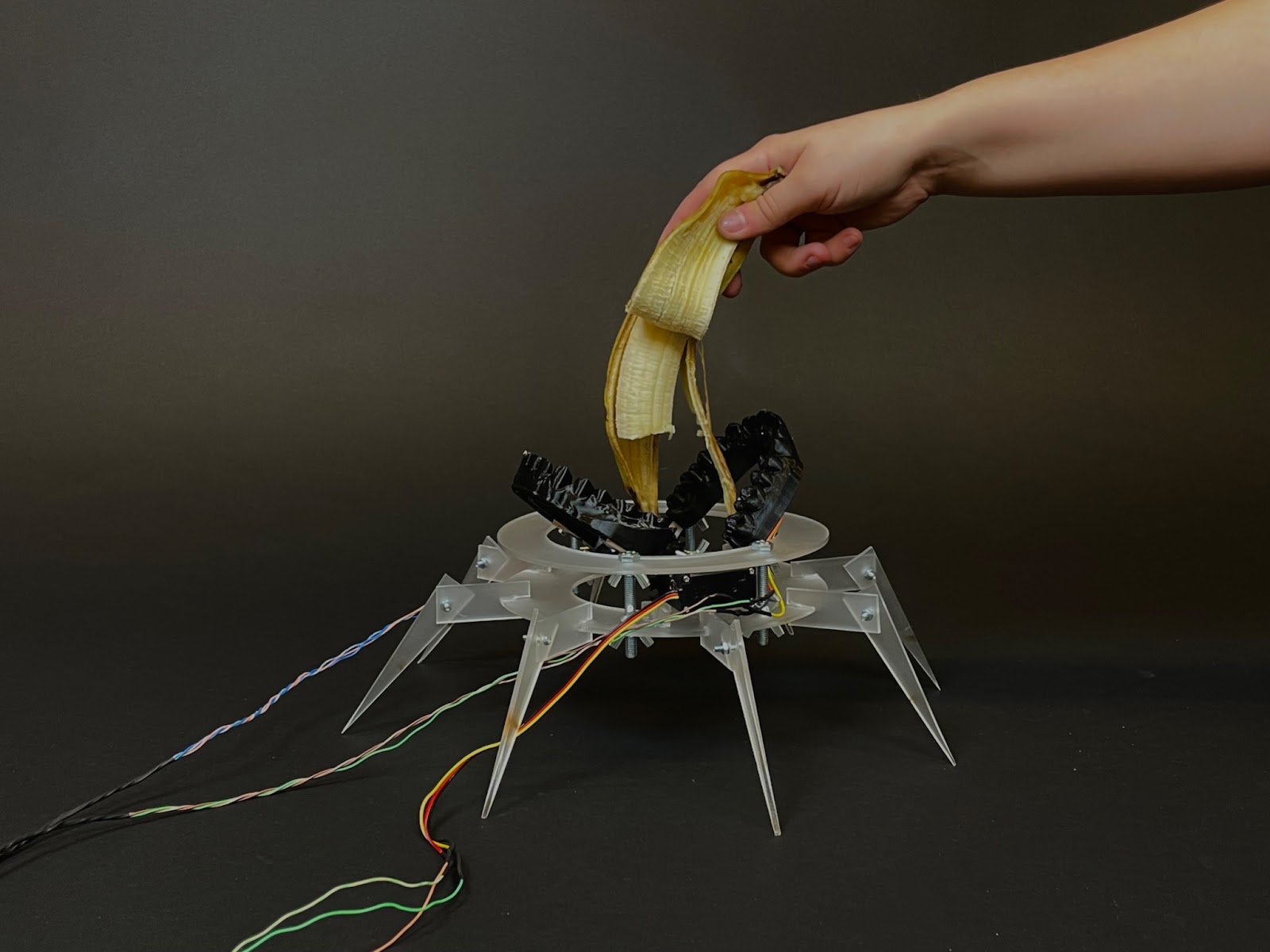
the Robot it self came from an idea that was a robotic salat maker. the idea evolved and the robot gained a little character. his mane is the Chopper or Mr. chopper and loves brown bananas, kale and watermelon.
Supplies
Belt sander (to sand down from the top of the gum)
3D printer
Laser cutter
Filament (for the 3D printer)
Acrylic sheet
Bolts, nuts and washers
4 small wood dices to put in the bottom of the gums
2 roods to fix in the servos and gums
Soldering wire
4 wires
Plastic/steel disk to put alginate in
Alginate powder
Water
Arduino
2 servos
Light sensor
Bread board
Soldering tool
screwdriver
Step 1
Take a mold of teeth in alginate and pour gypsum into it. Then you have a 1:1 mold of gypsum teeth



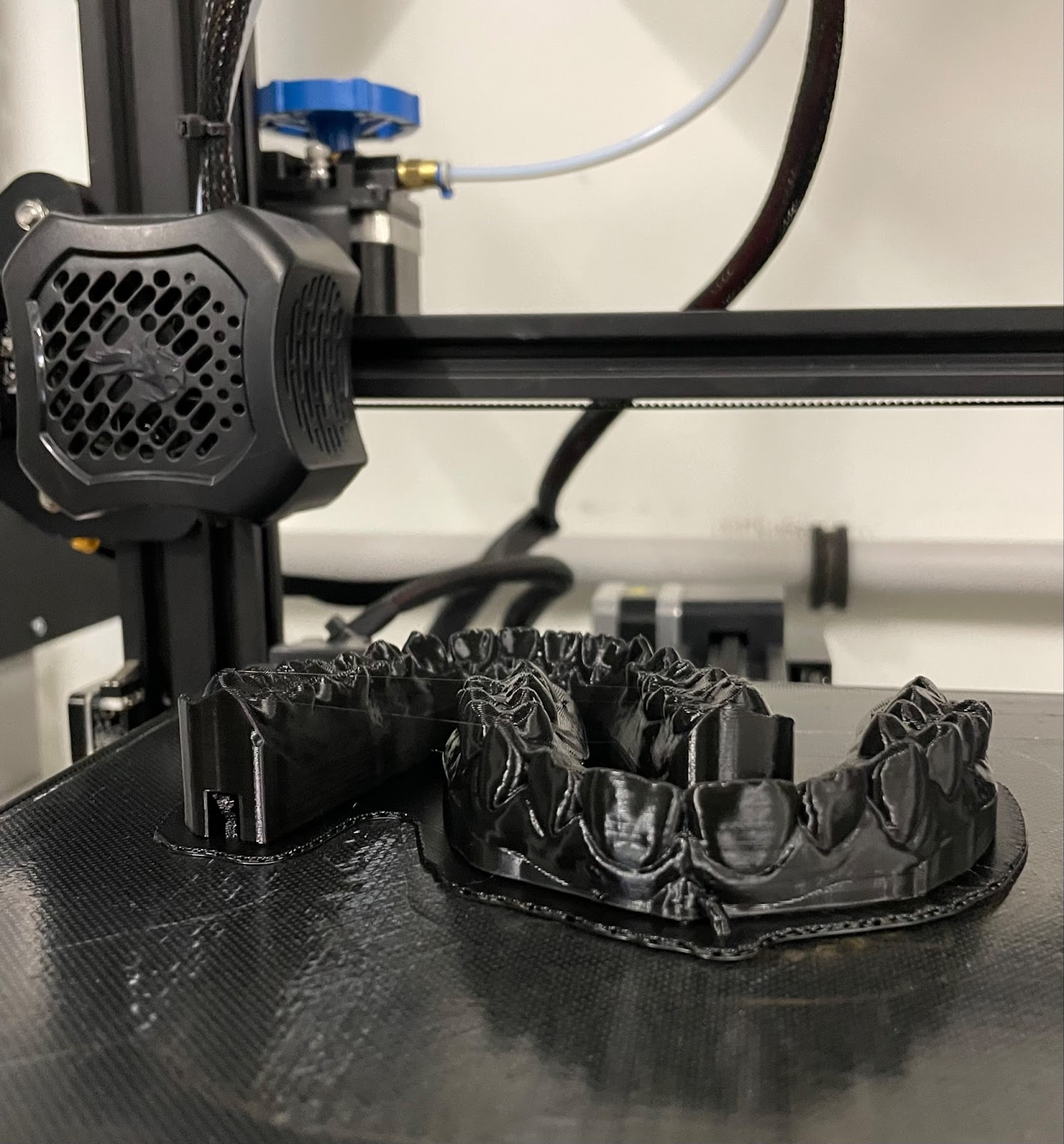
Step 2
Scan the teeth and make a STL file of them. Then you can 3D print them. We changed the size of them from 100% up to 150% and used black filament but you can use whatever you want and also you can choose the size of them, just bear in mind that you will also need to change the laser cut file if you change the size of the teeth. Now you have 1:1 gypsum teeth and 150% 3D printed teeth. You don’t need the gypsum teeth anymore unless you want to keep it as a souvenir.


Step 3
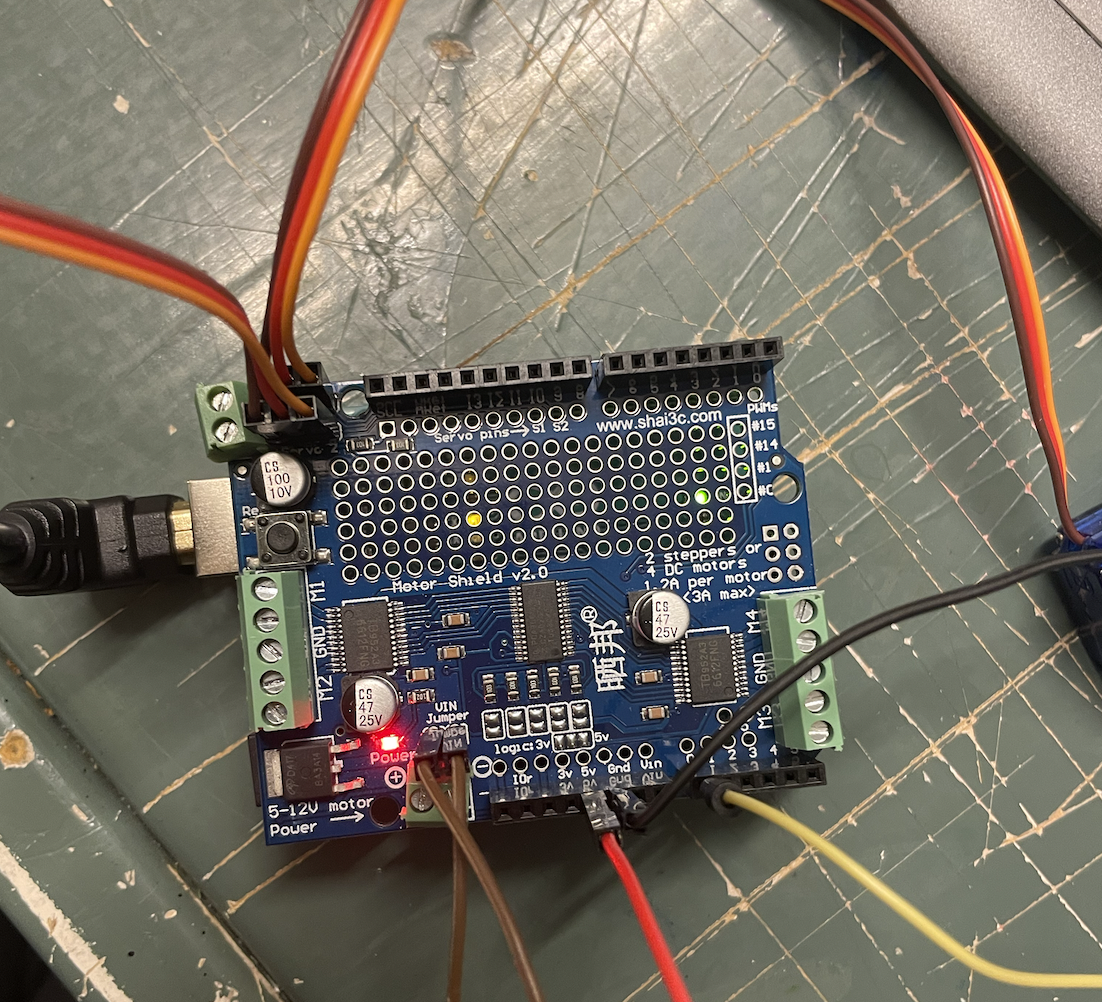
Next step is to find two servos that you will programme to make the “open-close” movement. The servos we used are called (deluxe) HITEC HS-322HD.
Plug them into a Arduino board and to the computer and make this arduino code:

We programmed it to move only from 60 to 10 degrees, enough for our mouth to move back and forth in an open-close mouth movement. To code two servos you have to name two different servos in the arduino and program them to do the same thing. In our case the servos are named T1 and T2,for our two 3D printed teeth pieces.
In this photo you can see the light sensor code too but more on that later. That's sensorValue.


Step 4
After that we make the body for the teeth to sit on. We wanted it to stand on its legs and look a little violent because the teeth weren't enough… We sketched up the body with two disks sitting on one another, the one with the bigger hole on top and the lower one with the joints at the bottom. The motors are pinched in the middle of these two disks. Then there are 8 legs that we joined on the disk.

Step 5
When we put all the parts together we used:
-8 3mm bolts, 8 washers and 8 nuts for the legs
-4 6mm bolts and 12 nuts for the rings/body
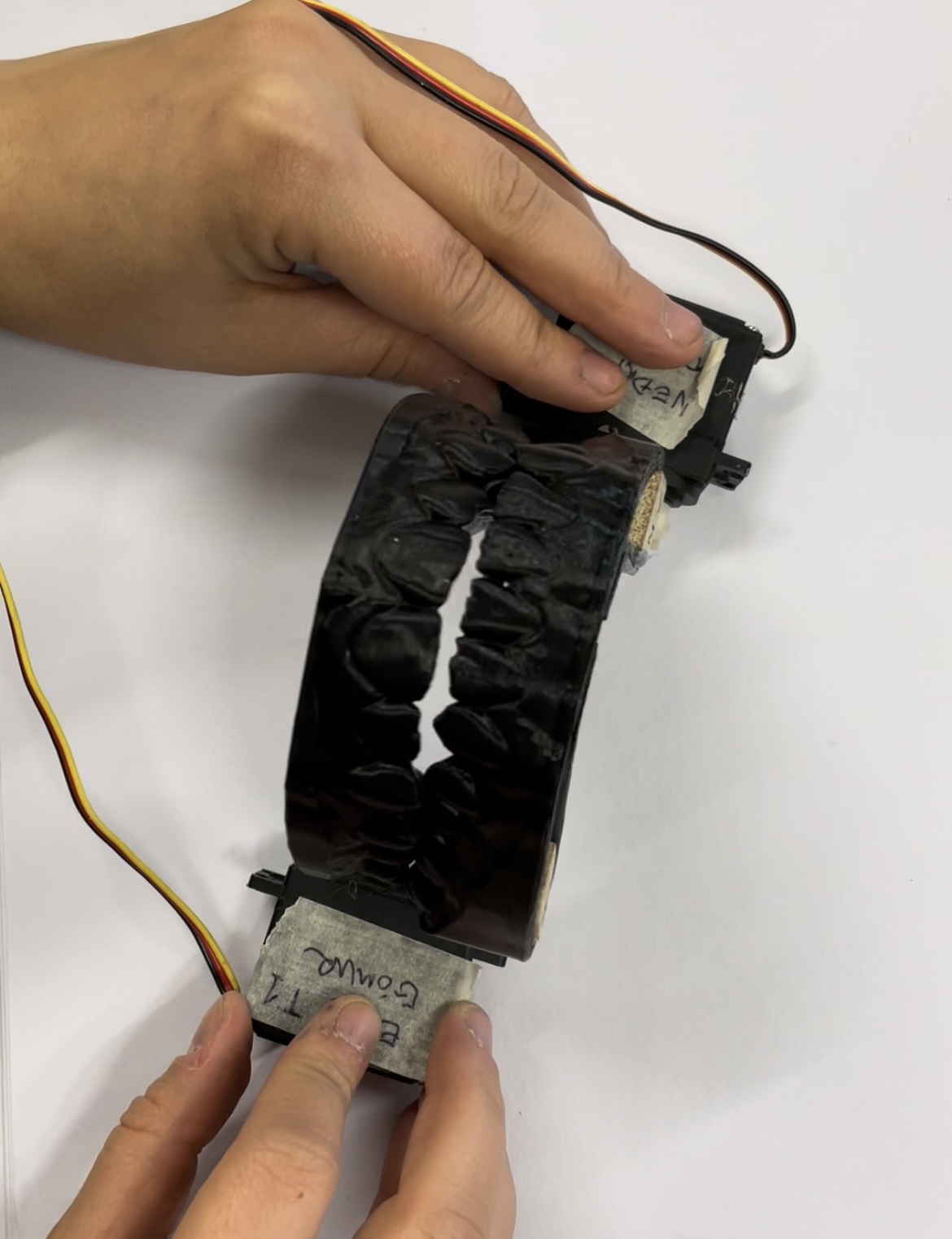
We also put a tiny bit of glue in the joinings of the legs and the body just for a bit more strength.
To strengthen the gums we filed small wood cubes to fit perfectly at the end of the gums. Then we stuck rods that fit from jaw A to motor B and vice versa. We used a thin wire to join the rods together and onto the gums.
Step 6
We programmed and placed a light sensor on the upper gum so when you hover your hand or other things over the mouth it starts to chop. We programmed the light sensor to chop for 10 seconds. We filed a little piece out of the upper jaw to place the light sensor in the gum.


Light sensor
https://arduinogetstarted.com/tutorials/arduino-light-sensor#content_arduino_code
Here above is the link to the arduino code and wire map for the arduino.

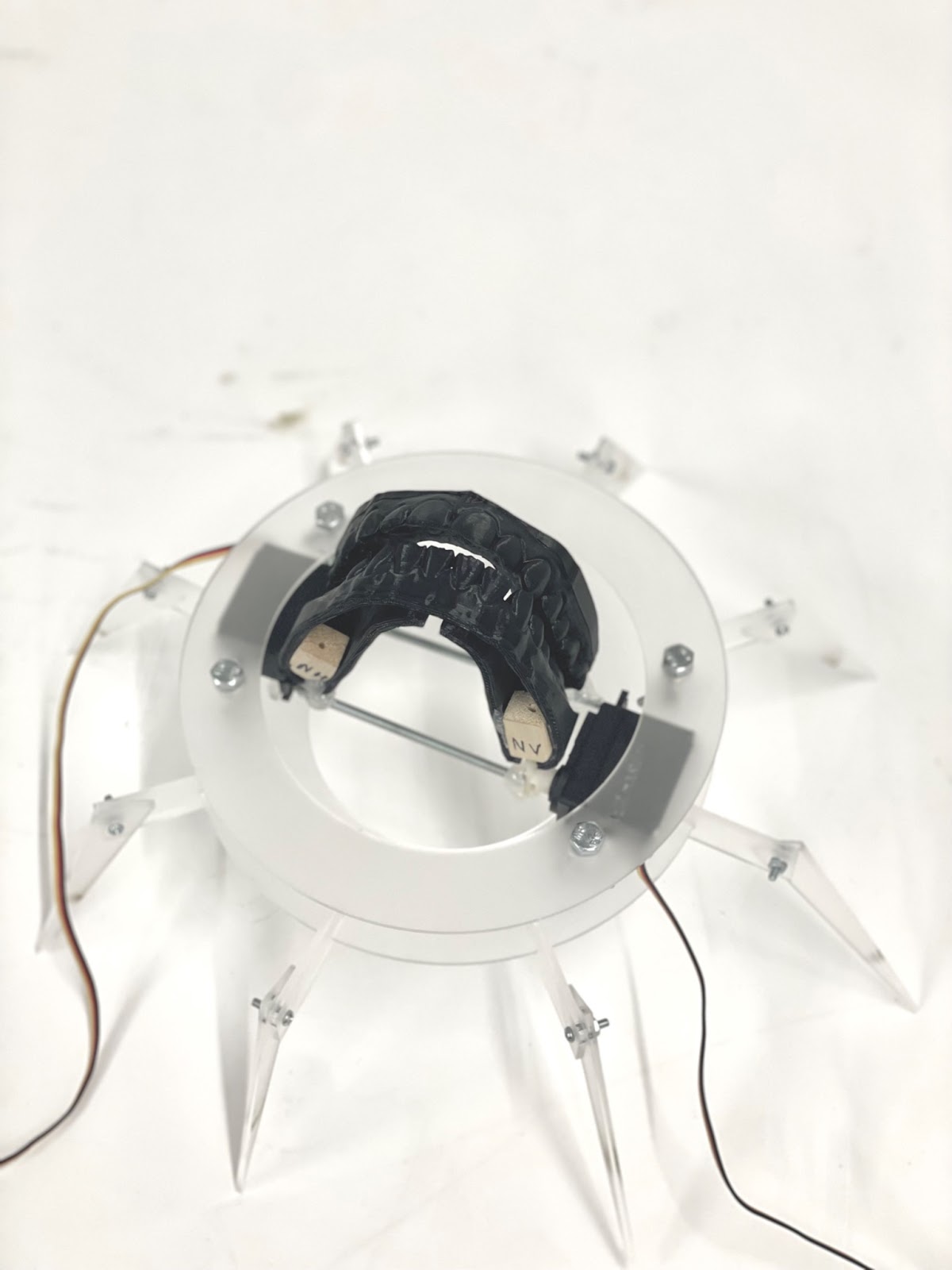
Step 7
After all these steps the robot really came together. All the parts of the body were screwed together and the servos were fixed in between the acrylic sheets so the teeth would not be loose when they start chomping.